Pré requis:
|
Info : liste des connaissances en algèbre
préparant au même concours. |
|
|
|
|
|
|
ENVIRONNEMENT du dossier:
AVANT :
|
APRES :
|
Complément d’Info :
1°) Liste des cours : prépa concours
A consulter pour compléments : 3°)Suite : Module sur
les primitives et les intégrales |
||
|
|
|
|
|
|
TITRE :niveau III : LES DIFFERENTIELLES.
|
|
|
|
|
|
|
|
|
|
1.
Différentielle première
d’une fonction d’une variable indépendante. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.
Différentielle
première d’une fonction de plusieurs variables. |
|
|
|
9.
Représentation
géométrique de la différentielle première d’une fonction de deux variables. |
|
|
|
10. Emploi de la différentielle totale pour le calcul
des dérivées partielles. |
|
|
|
11.
Exemples géométriques de différentielles. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F
) Variation de longueur d’un
segment dont les extrémités décrivent deux courbes données. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Contrôle |
évaluation |
|||
COURS
|
|
1- Différentielle première d’une fonction d’une variable indépendante. |
|
||||||||
|
|
Soit la fonction
« y = f (x) » On appelle « différentielle première
» de cette fonction le produit de sa dérivée par un accroissement
arbitraire « h » donné à la variable « x » , soit l’écriture : « d y = h f
‘ (x) = h y ’ » |
|
||||||||
|
|
Si , en particulier, nous
appliquons cette définition à la fonction « y = x » , nous avons alors « y ‘ = 1 », et par suite
« d x = h » |
|
||||||||
|
|
Convenons de prendre « h = d x » dans tous les cas nous obtenons ainsi une
nouvelle forme de la différentielle : « d y = y ‘ d x » D’où : (on retiendra que : ) |
|
||||||||
|
Q ..? |
La différentielle
d’une fonction est le produit de sa dérivée par la différentielle de la
variable. |
|
||||||||
|
|
C’est de là que vient la notation :
« |
|
||||||||
|
|
Remarque : Il est intéressant d’expliquer
comment on est conduit à la convention « h = d x » Supposons que « x » soit lui-même une
fonction « g ( t ) » d’une autre variable « t » et
soit « k » l’accroissement
qu’il faut donner à « t »pour que « x » prenne
l’accroissement « h ». La fonction « y = f (x) » devient une
fonction de « t », soit « F( t ) » , dont la différentielle
de « y = F( t ) » est par
définition : « d y = k F ‘ ( t ) » La même définition entraîne que : « d x =
k g ‘ ( t ) ». D’autre part , d’après le théorème donnant la
dérivée d’une fonction de fonction , on a : « F
‘ ( t ) = f ‘ ( x )
g ‘ ( t ) » Par suite : « d y = f ‘ ( x ) . k g ‘ ( t )
» « d y = f ‘ ( x ) . d x
» En comparant : avec : « d y = h
f ‘ (x) » on voit bien que : « h = d x » |
|
||||||||
|
|
2.
Signification géométrique de la différentielle première. |
|
||||||||
|
|
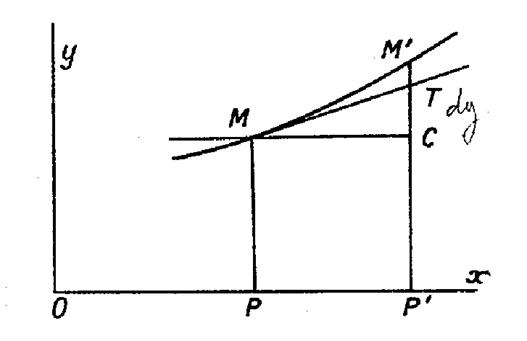
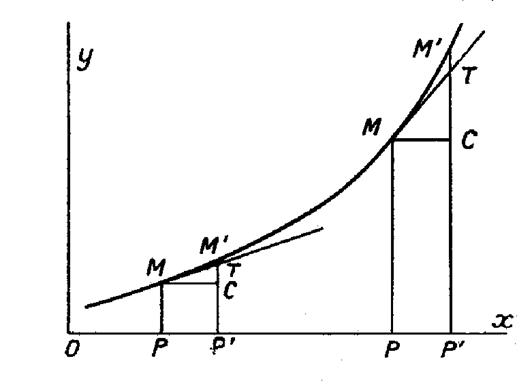
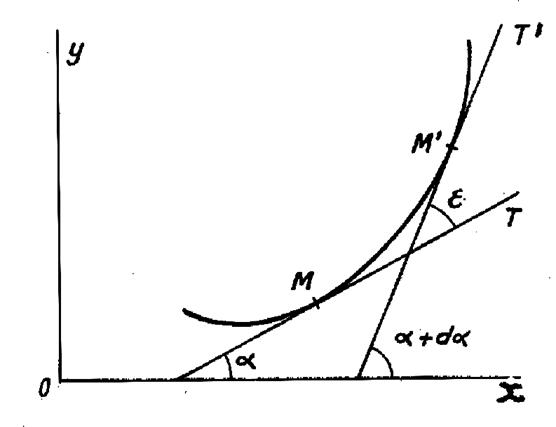
Traçons la courbe représentant les variations de
la fonction : « y
= f ( x ) ». Soit « M »
le point d’abscisse « Menons la tangente « MT », en
« M », à la courbe et soit
« T » son intersection avec « P ‘ M’ ». Enfin ,
soit « MC »la parallèle à l’axe « O x » menée par
« M » . L’angle « CMT » a pour tangente la
dérivée « y ‘ », de sorte que : « CT
= MC . tan ( |
|
|
|||||||
|
|
D’où : ( on
retiendra que : ) |
|
||||||||
|
|
La différentielle représente l’accroissement
d’ordonnée sur la tangente. |
|
||||||||
|
|
Elle constitue
une valeur approchée de l’accroissement exacte « CM’ », de
la fonction ; et l’erreur est d’autant plus petite que l’accroissement
« dx » de la variable est lui-même plus petit. En effet, dans ces conditions, l’arc de courbe
diffère de moins en moins de la tangente.
|
|
||||||||
|
|
Remarque : Ceci nous fait comprendre une autre définition de la différentielle
première : La différentielle première est la partie
principale de l’accroissement pris par la fonction quand on donne à la
variable un accroissement infiniment petit. |
|
||||||||
|
|
En effet, quand « P’ » tend vers
« P » , la différence « TM’ »
entre « dy » et l’accroissement
« y » devient négligeable par rapport à « dy ». On peut encore dire : La dérivée « f ‘ ( x ) » est la limite du rapport : Par suite : ( ·
On a donc :
« f ‘ ( x + h ) - f ‘ ( x ) = h .
f
‘ ( x ) + h Puisque « h |
|
||||||||
|
Exemple : soit « f ( x )
= x² » Posons « x = 4 » et « h = 0,001 » La différentielle de la fonction est : « d f
= 2 x .h » = 2
fois. 4 fois .
0,001 = 0,008 L’accroissement exact de la fonction est «
4,001)² - 16 = 16, 008001 – 16 =
0,008001 La différence entre l’accroissement de « f ‘
( x ) » et sa
différentielle est :
0,008001- 0,008 = 0,
000 001 Cette différence est très petite vis-à-vis de la
différentielle « d f ». |
|
|||||||||
|
|
3 – Calcul d’une différentielle. |
|
||||||||
|
|
On obtient la différentielle d’une fonction « f‘
( x ) » en multipliant sa dérivée par « d
x » |
|
||||||||
|
|
Exemple : soit « y = sin
x » ; on a « y ‘ = cos x » et
« d y = cos x . dx » |
|
||||||||
|
|
4 – Calcul d’une
différentielle d’une somme . |
|
||||||||
|
|
Soit
« y = u + v » , on sait que « y ‘ = u’ + v ’ » D’autre part : «
d y = y ‘ . dx » ; « d
u = u ‘ . dx » ; « d v
=v ‘ . dx »
, par
suite , en multipliant par « dx » on
a : « d y = d u + d v » |
|
||||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
|
|
5 – Calcul d’une
différentielle d’un produit . |
|
||||||||
|
|
D’après le même raisonnement ,
on a : « d ( u .v ) = u dv
+ v du » |
|
||||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
|
|
6 – Calcul d’une
différentielle d’un quotient . |
|
||||||||
|
|
On a de même : « |
|
||||||||
|
|
|
|
||||||||
|
|
7- Différentielle
seconde d’une fonction d’une variable. |
|
||||||||
|
|
Soit : « dy = y ‘ dx » la différentielle première de la fonction
« y ». |
|
||||||||
|
|
Le second membre est un produit dont on peut prendre , à nouveau, la différentielle. Mais on voit sur
la figure ci contre , que si l’on veut comparer entre elles les valeurs que
prend la différentielle « CT » pour toutes les valeurs de
« x » , il faut prendre pour « P P
‘ » une valeur indépendante de « x ». Cette valeur sert , pour
ainsi dire, d’unité de mesure pour évaluer les différentielles. On obtient ainsi , ce
qui est logique, une différentielle d’autant plus grande que la fonction
croît plus rapidement . C’est pour cette raison que « dx » ne doit
pas être différentié, de sorte que : « d (d y )= d
y ‘ . d x » D’où : « d² y = y ‘ ’ dx . dx = y
‘ ’ ( dx )² » « d² y » s’appelle « la
différentielle seconde de y » . On peut donc
écrire : « d²
y = y ‘ ’ dx ² » ce qui explique la notation : « |
|
|
|||||||
|
|
8 – Différentielle
première d’une fonction de plusieurs variables. |
|
||||||||
|
|
Par définition , la
différentielle première de la fonction « Z = f ( x ; y ) »
est « d z = f ‘ (x ) d x + f ‘ y
d y »
« d z » s’appelle aussi une
différentielle totale . Ici encore « d z » est la partie principale
de l’accroissement pris par
« z » « d z quand on donne à « x » et
« y » des accroissements infiniment petits .
Bornons nous à une vérification numérique : |
|
||||||||
|
|
Exemple : soit « z = Donnons à « x » l’accroissement «
0,001 » et à « y « l’accroissement « 0,003 » ,
de sorte que « z » prend la nouvelle valeur : « D’autre part ,
l’accroissement exact de « z » est
« La différence entre l’accroissement et la
différentielle est « |
|
||||||||
|
|
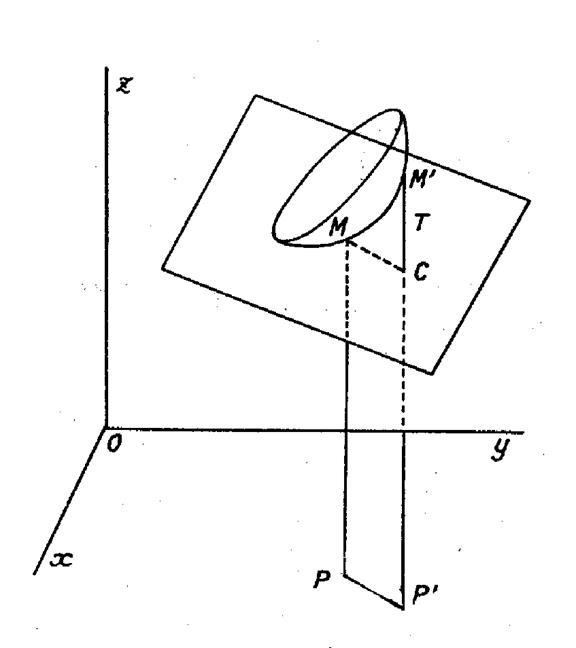
9- Représentation
géométrique de la différentielle première d’une fonction de deux
variables. |
|
||||||||
|
|
Info : géométrie dans l’espace
… « voir : repérage d’un point dans l’espace » .. |
|
||||||||
|
|
Par rapport à trois axes orthogonaux
, 0x , Oy , Oz (figure ci contre)
l’équation « z = f ( x , y) »représente une surface. |
|
||||||||
|
|
Cherchons à interpréter la différentielle. « dz = f ‘x dx + f ‘y dy » à l’aide du plan tangent
, de même que nous avons
utilisé la tangente à une courbe pour interpréter la différentielle d’une
fonction d’une variable. Soit le
point « M » projeté sur le plan « x0y »en « P »
et « M’ » le point projeté en « P’ » de coordonnées ( x + dx ; y + dy ) . Menons le plan tangent ,
en « M » à la surface et soit « T »son intersection avec
« P ‘ M ’ ». Enfin soit « MC » la parallèle à
« P P ’ » menée par «M ». L’équation du plan tangent est : « Z – z =
( X – x ) f ‘ x + ( Y – y ) f ‘ y » « X , Y ,
Z » étant les coordonnées
courantes. La cote « Z » du point « T »
s’obtient en faisant : «
X = x + dx » ; « Y
= y – dy » D’où « Z – z = |
|
|
|||||||
|
|
Par suite : la différentielle représente l’accroissement de cote sur le plan
tangent. Elle constitue une valeur approchée de
l’accroissement « C M’ ». L’erreur devient négligeable quand
« dx » et « dy » tendant vers
zéro. En effet , la surface diffère alors de moins
en moins du plan tangent. |
|
||||||||
|
|
|
|
||||||||
|
|
10 – Emploi de la
différentielle totale pour le calcul des dérivées partielles. |
|
||||||||
|
|
|
|
||||||||
|
|
Soit
« dz = f ‘x dx + f’ ‘ y dy » la
différentielle d’une fonction « f ( x ; y
) » de deux variables indépendantes « x » et « y » . Supposons que , par un
procédé quelconque , on ait mis « dz » sous la forme « d z =
A dx + B dy ».
En identifiant ces deux expressions de « dz » ,
on obtient : ( f ‘ x – A ) dx + ( f ‘ y – B) dy
= 0 Cette identité a lieu quelle que soit la manière
dont varient « x » et « y » ,
c'est-à-dire quelles que soient les valeurs de« dx » et de « dy » . Par suite : ( f ‘ x
= A ) et ( f ‘ y = B) On obtient donc ainsi les dérivées de « f » par rapport à « x »
et « y » . |
|
||||||||
|
|
Exemple : Soient « r » et « « x = r . cos Ces deux équations définissent implicitement
« r » et « Cherchons les dérivées partielles de
« r » et de « En différenciant les deux équations précédentes , nous avons :
résolvons ces équations par rapport à « dr »
et « d Nous obtenons : « dr = cos « d D’après ce qui précède ,
on a :
|
|
||||||||
|
|
11
Exemples géométriques de différentielles. |
|
||||||||
|
|
|
|
||||||||
|
|
|
|||||||||
|
|
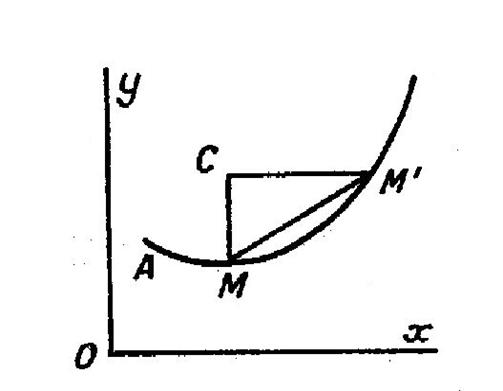
Soient « M ( x ;
y ) et « M’ ( (x + dx) ; ( y + dy)) deux points infiniment voisins d’une courbe
plane ( voir ci contre). En
appelant « s » l’arc « AM » ,
compté sur la courbe à partir d’une origine « A », l’accroissement
« ds = M M’ »
de l’arc diffère très peu de la corde « MM’ ». On
peut donc écrire approximativement : «
d s ² = d’où la différentielle de l’arc. « ds = Ce résultat obtenu en confondant l’arc et la
corde, est d’autant plus approché que « M’ » est voisin de
« M » . Il sera donc utilisable quand
l’arc « MM’ » tendra vers zéro. |
|
|
|||||||
|
|
|
|
||||||||
|
|
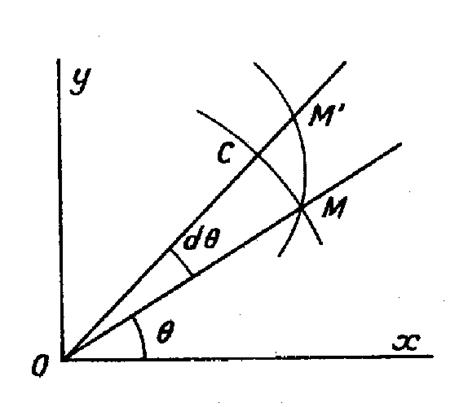
Supposons
maintenant la courbe définie en
coordonnées polaires. ( voir la courbe ci dessous) |
|
||||||||
|
|
Soient « r » et « Le cercle de centre « O »et de rayon
« OM » coupe « OM ‘ »en « C »et le petit arc de cercle « CM » peut
être assimilé à un segment de droite perpendiculaire à « CM ‘ ».
Par suite le triangle rectiligne « MCM ’ »est rectangle en
« C »et « d’autre part , le petit
arc de cercle « CM » est égal au produit du rayon par l’angle au
centre compté en radians. « CM =
r d On
a donc : « |
|
|
|||||||
|
|
Remarque : Ce résultat peut se déduire du précédent
. Soient « x ; y » les coordonnés cartésiennes de
« M » , On a : « x = r . cos Par suite et «
d x² + dy² = ( cos |
|
||||||||
|
|
|
|||||||||
|
|
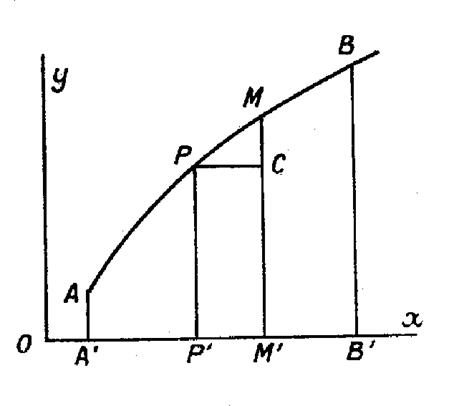
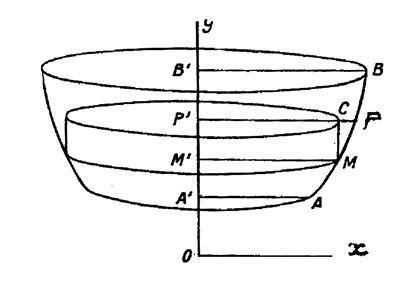
Considérons l’aire limitée par une courbe (voir
figure ci-dessous) |
|
||||||||
|
|
L’axe « Ox »
et deux parallèles « A’ A ;
B ‘ B » à l’arc « 0y ». En partageant
cette aire par des parallèles « P ‘ P » et « M’
M » à « Oy », on obtient un élément
d’aire qui est un trapèze curviligne « P ‘ P M M
’ » Menons par « P » la parallèle « P
C » à « O x ». Nous obtenons un rectangle « P ‘ P C M
’ »dont l’aire diffère très peu de l’aire du trapèze. Ce rectangle représente la différentielle de
l’aire. Il a pour surface : « P ‘ P . P ‘ M’ = y
dx » |
|
|
|||||||
|
|
|
|||||||||
|
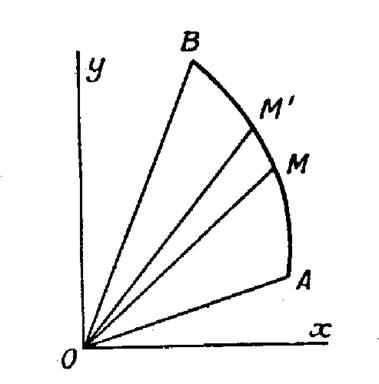
|
L’aire d’un secteur « AOB » ( figure ci contre) limité par
une courbe et deux rayons vecteurs ,
peut être décomposée en éléments tel
que « M O M ’ ». Ce sont des triangles curvilignes
, assimilables à des triangles rectilignes obtenus en remplaçant l’arc
« M M ’ »par la corde. Pour avoir une valeur approchée de l’élément d’aire ,
c'est-à-dire sa différentielle, distinguons deux cas suivant la manière dont
la courbe est définie. |
|
|
|||||||
|
|
1°) En coordonnées cartésiennes
, nous appelons « x » et « y » , les coordonnées
de « M » et « x + dx » ; « y + dy » celles de « M’ » . L’aire du triangle « M O M ’ » est ,
au signe prés : |
|
||||||||
|
|
|
O |
0 |
1 |
= |
|
||||
|
« x » |
« y » |
1 |
||||||||
|
« x + dx » |
« y + dy » |
1 |
||||||||
|
|
2°) En coordonnées polaires , soient
« r » et « « En négligeant « dr »
vis-à-vis de « r » , et remplaçant le
sinus par l’arc , nous obtenons la différentielle cherchée : « Remarque : O peut déduire le second résultat
du premier. En effet , en posant : « x =
r cos . On a : « dx = cos «
x dy – y dx = r cos. |
|
||||||||
|
|
|
|||||||||
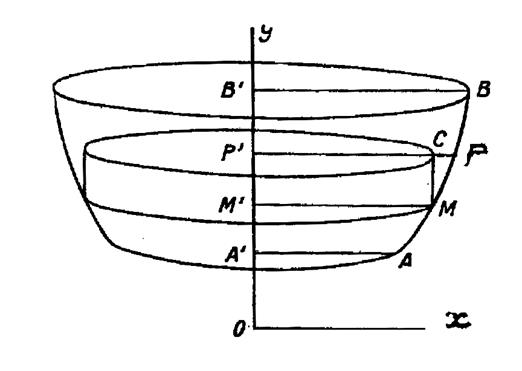
|
|
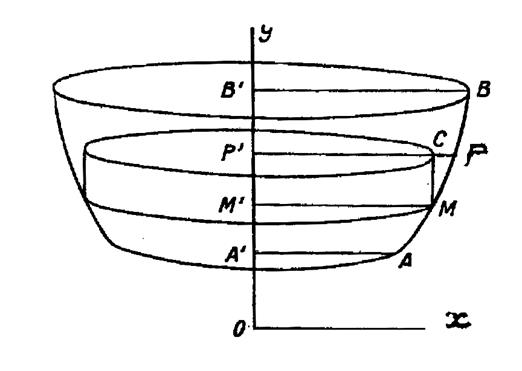
Considérons une courbe « y » f( x ) qui tourne autour de l’axe « Oy » (voir ci contre). L’aire limitée par la courbe « 0y » et
deux parallèles « A A ‘ » ;
« B B ‘ »à « Ox »engendre
un volume de révolution. Partageons ce volume par des plans infiniment
voisins et perpendiculaires à « Oy » L’élément de volume ,
engendré par le trapèze curviligne « M’ M P P
‘ » peut être remplacé approximativement par le cylindre engendré par le
rectangle « M’ M P P ‘ ». Le rayon de base du cylindre est « M’ M =
x » Sa hauteur
est « MC = dy » Son volume est la différentielle cherchée «
d V = |
|
|
|||||||
|
|
|
|
||||||||
|
|
|
|||||||||
|
|
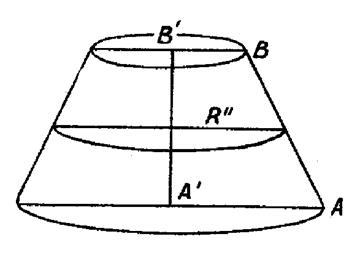
Cherchons maintenant la différentielle de l’aire
de révolution engendrée par la même courbe en tournant autour de « O
y ». (voir ci contre) L’élément d’aire est une petite zone décrite par
l’arc « MP ». Cette aire est assimilable à l’aire du tronc de cône engendré par la corde « M M’ ».( On commettrait une
erreur en prenant l’aire du cylindre engendré par « MC »). |
|
|
|||||||
|
|
Rappelons que l’aire d’un tronc de cône est le demi-produit de la somme des circonférences de base par l’ apothème. « ( voir
la figure ci contre) ou encore , en appelant
« R ‘ ’ »la rayon d’une section équidistante des bases, de sorte
que « R + R ‘ = 2 R ‘ ’ » , on obtient pour surface « 2 |
|
|
|||||||
|
|
Dans le cas actuel ( voir ci contre ) R ‘ ‘
est l’abscisse « x » du point « M » et
« a » est l’élément d’arc « ds =
MP » de la courbe génératrice. Exactement , R
‘ ‘ = x + |
|
|
|||||||
|
|
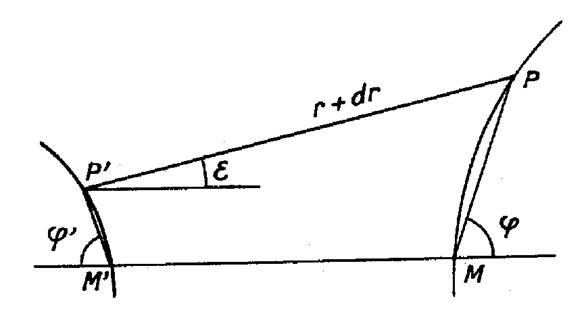
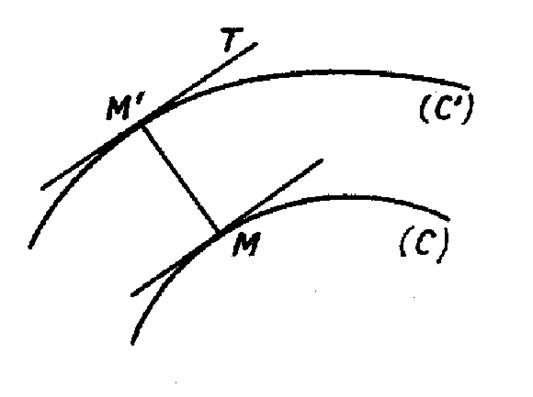
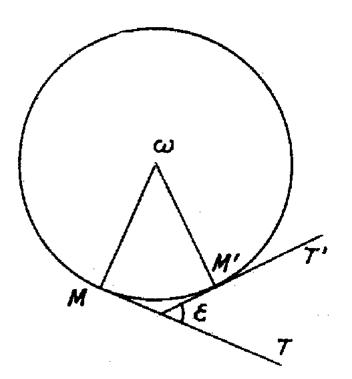
F ) Variation de longueur d’un segment dont les
extrémités décrivent deux courbes données. |
|
||||||||
|
|
Soit un segment
de droite « M’ M »de longueur « r », dont les
extrémités décrivent deux courbes données. ( ci contre). Quand les deux points « M » et
« M’ » décrivent respectivement deux petits arcs « MP = ds » et « M ’ P ‘ = d s’ », le segment
prend une nouvelle position « P ‘ P » ,
de longueur « r + d r » Soient d’autre par , « Projetons le contour polygonal « M ’ P
‘ MP » sur la droite « M’ M »et désignons par « « r = - M’ P ‘ cos |
|
|
|||||||
|
|
D’autre part , «
cos On peut donc écrire : « r = - cos D’où finalement : «
dr = -
cos Nous allons nous borner à deux applications de
cette formule. |
|
||||||||
|
|
1°) Courbes parallèles. Sur toutes les normales à une courbe ( C )
(figure ci contre) portons une longueur constante
« M M’ = r » . Le lieu de « M
’ » est ,
par définition, une courbe ( C’) parallèle à « C ». Dans ce cas : « dr
= 0 » ; « Par suite : cos Comme « d s’ » n’est pas nul , on a « cos |
|
|
|||||||
|
|
|
|
||||||||
|
|
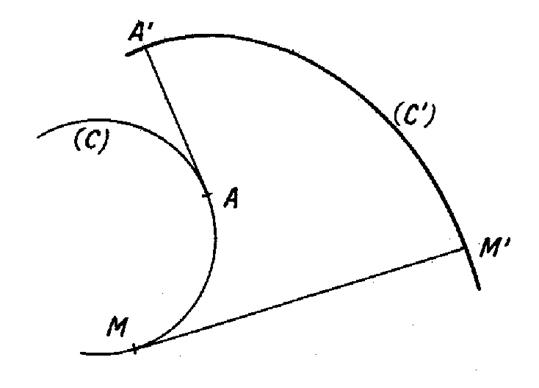
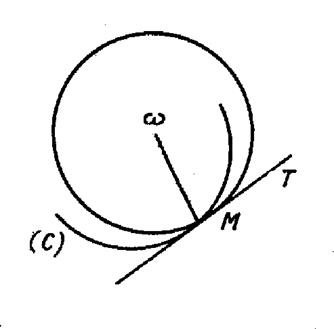
2°) Propriété de
l’arc de développée. Soit «
C » la développée d’une courbe « C’ » c’est à dire
l’enveloppe de ses normales ( voir ci contre) . Le segment « M M
’ » de longueur « r » , fait avec la
courbe « C » en « M » , un angle nul et avec la courbe
« C’ » en « M ’ », un angle droit. Par suite ,
« cos
En intégrant , on a : « r – r 0 = s – s 0 » ; « r 0 et s 0 » étant les valeurs de
« r » et « s » pour une position particulière du segment
« A A ‘ ». D’autre part : « r – r 0 =
M M ’ » et
« s – s 0 =
arc AM», d’où : l’arc de développée est égal à la différence des
longueurs des normales limitées à la courbe et à sa développée. |
|
|
|||||||
|
|
|
|||||||||
|
|
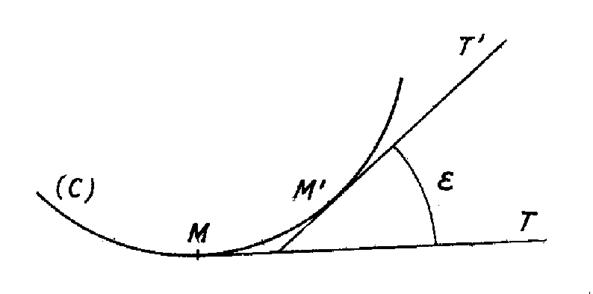
Soit « M M ‘ »un petit arc « ds » d’une courbe « C » ( figure ci contre). Les tangentes « MT » et « M ’ T
’ » font entre elles un petit
angle « Le rapport « La courbure est « |
|
|
|||||||
|
|
|
|
|
|||||||
|
|
Cette définition se comprend en considérant un
cercle ( voir figure ci contre). L’angle de
contingence est égal à l’angle « M On sait que l’arc « M M
’ » est le produit du rayon par la mesure de l’angle au centre, évalué en radian. Par suite : « Arc M M ‘= |
|
|
|||||||
|
|
|
|
|
|||||||
|
|
Désignons par « La tangente voisine « M’ T’ »fait avec
« O x »l’angle « Par suite : R = |
|
|
|||||||
|
|
13 - Calcul du rayon de courbure . |
|
|
|||||||
|
|
Soit une
courbe « y = f (x ) » on sait que «
ds = «
ds = D’autre part, le coefficient angulaire de la
tangente est égale à la dérivée, c'est-à-dire que « tan On
a donc : « Et : « d D’après la façon dont on calcule une différentielle
( info
++) : Donc :
On choisit le signe devant « y ‘ ‘ » , de manière à obtenir pour « R » une valeur
positive. |
|
||||||||
|
|
Définition :
Le cercle de courbure « Le cercle de centre « On démontre que le cercle de courbure est la
position limite d’un cercle qui est tangent en « M » à la courbe ( C )et qui passe par un point « M’ » de ( C )
infiniment voisin de « M » |
|
|
|||||||
|
|
En général, la courbe ( C
) traverse , en « M », son cercle de courbure. Sur l’arc de courbe extérieur au cercle, la
courbure est plus petite qu’en « M », sur l’arc intérieur au cercle
la courbure est plus grande. |
|
||||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
|
|
CE qui termine
ce cours………….. |
|
||||||||






|
|
|
|
|
|
|
|
TRAVAUX AUTO FORMATIFS. |
|||
|
|
|
|
||
|
|
CONTRÔLE |
|
||
|
|
Voir le cours !!!!!voir les
définitions en « orange » !!!!! |
|
||
|
|
|
|
||
|
|
EVALUATION :
|
|
||
|
|
Voir le cours !!!!! |
|
||